Gerekli Malzemeler:Arduino Uno Breadboard Geliştirme Kartı
Arduino Sensor Shield
12x SG90 Servo Motor
Arduino HC-05 Bluetooth Modülü3D Baskı Örümcek Robot Gövdesi
4x M3 Vida ve Somun
Yapım Aşamaları:
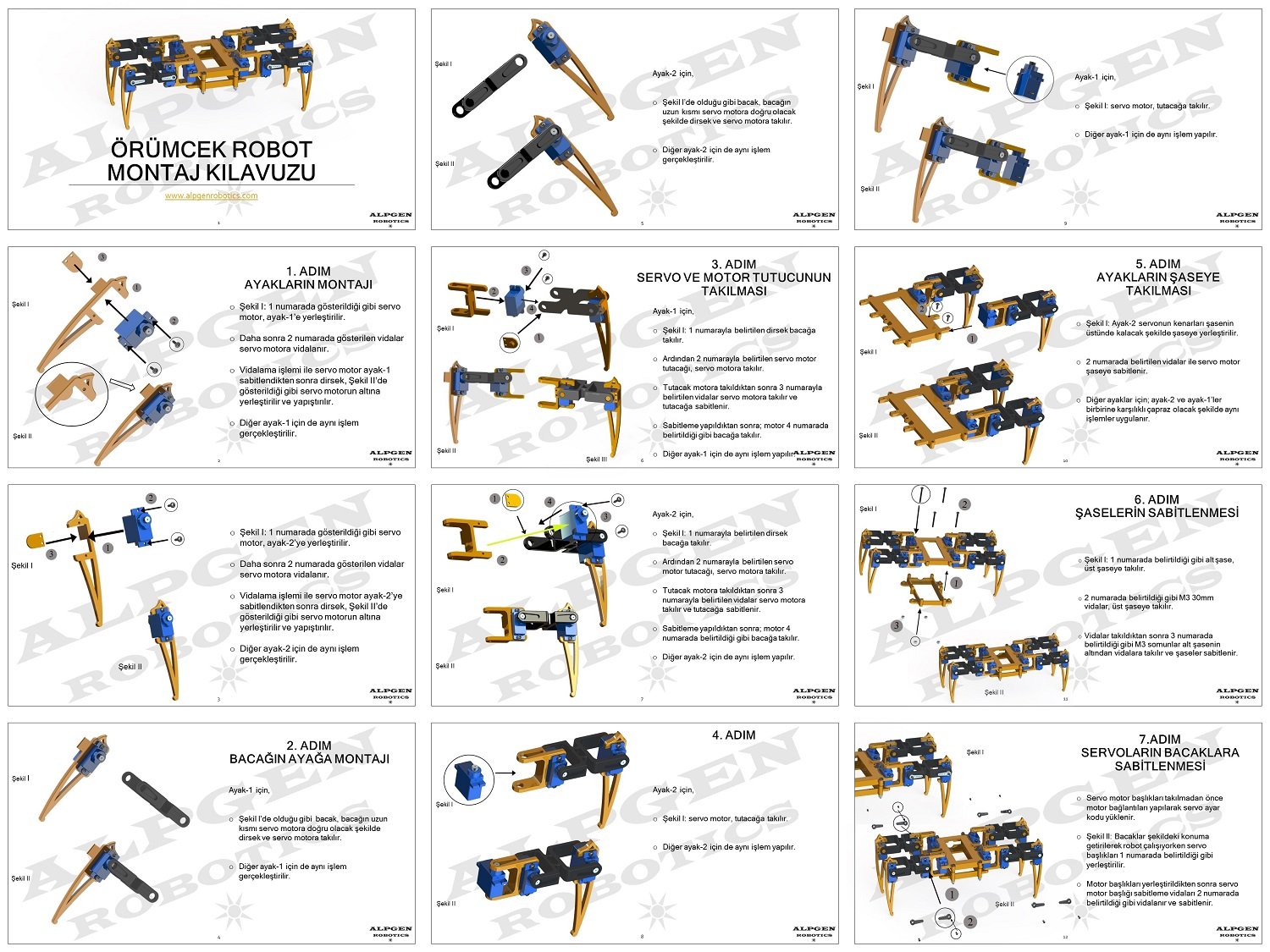
1) Robotu yapmak için 3D yazıcımızda robotumuzun parçalarını basıyoruz. Eğer kendi 3D yazıcınız yok ise robotun 3D setine sitemizden ulaşabilirsiniz. (https://www.alpgenrobotics.com/magaza/orumcek-robot-set-3d)
Robotun 3D parçalarının STL kaynaklarına buradan ulaşarak parçaları kendiniz basabilirsiniz. Set içerisinde toplam 22 parça bulunmaktadır. Ortalama baskı süresi baskının kalitesine bağlık olmakla birlikte 8 saat sürebilmektedir.
2) Parçaları temin ettiğimize göre örümcek robotumuzun montajına başlayabiliriz. Öncelikle SG90 servo motorlarımızı yerleştirip vidaları takıyoruz. Beyaz sabitleme aparatlarını takmıyoruz. Çünkü servoların açıları ayarlı değil henüz. Servoları takıp gövdeyi hazır hale getirdikten sonra Arduino Uno'ya öncelikle Servo Ayar kodunu yüklüyoruz. Servo ayar kodu yüklerken sensor shield Arduino Uno'ya bağlı olmamalı. Özellikle servo motorlar Sensör shield üzerine takılı iken Arduino bilgisayara takılır ise motorların çekeceği akımdan dolayı bilgisayarımızın portuna zarar verebiliriz. Bu yüzden Arduino üzerine sensör shield takılı değilken kod yüklemek en güvenlisidir.
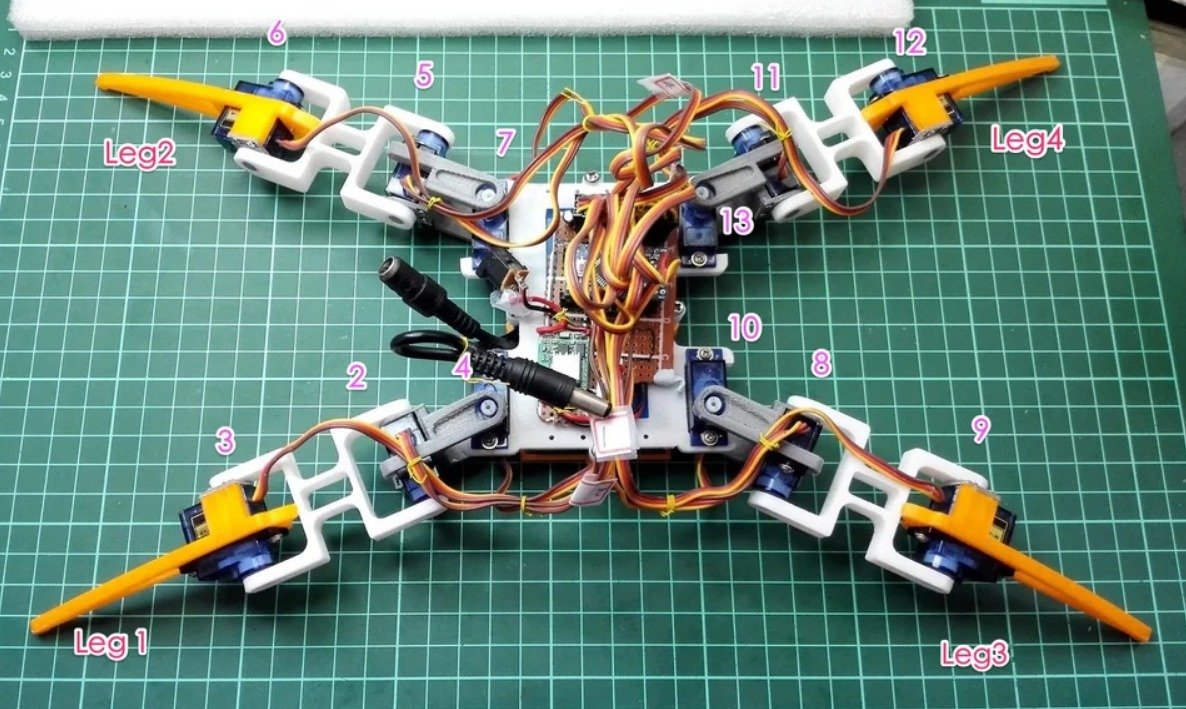
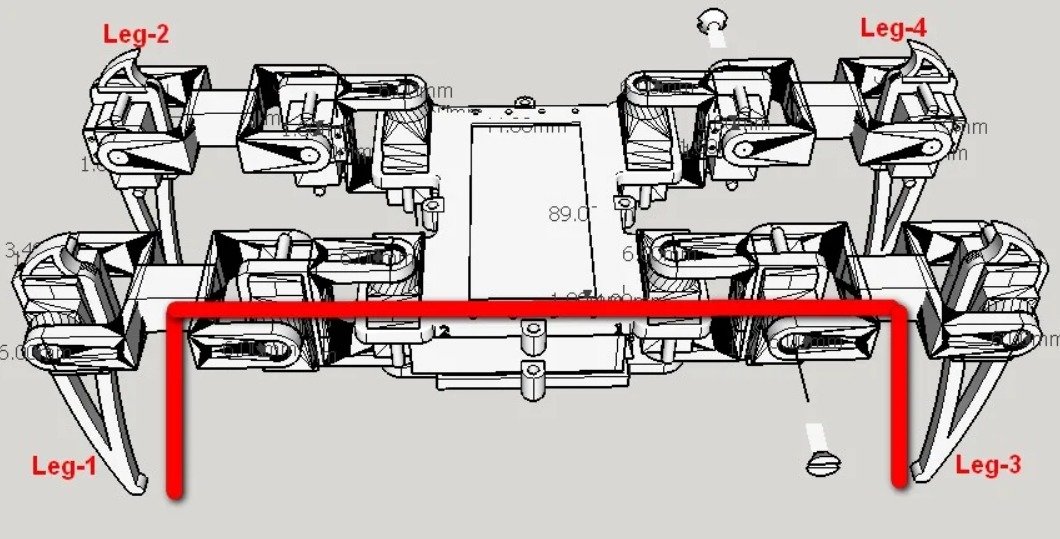
Robotumuzun bacaklarını yukarıda görüldüğü gibi ayarlayıp servo motorları sensör shield üzerine takıyoruz. Numaralar motorların sensör shield üzerinde takılacağı numaraları göstermektedir. Gövdeye bağlı olan gri parçaların yönlerine dikkat edin. Ayrıca beyaz parçanın da bir tarafı kısa bir tarafı uzun. Kısa taraf gövdeye denk gelecek şekilde, uzun taraf bacağın ucuna gelecek şekilde takmalısınız. Servo motorları yerleştirip motor kablolarını da taktıktan sonra sıra servo ayar kodunu yükleyip servo motorları sabitlemeye geliyor.
3) Sensör shield Arduino Uno'ya bağlı değilken servo ayar kodunu yüklüyoruz. Kod yüklendikten sonra Arduino ile PC bağlantısını kesin ve sensör shield i Arduino Uno'ya takın. Servoların çalışabilmesi için Sensör Shield in güç girişine pilinizi takın. Pili taktığınızda servo motorlar hareket edecektir. Açıları ayarlıyken robotu aşağıdaki şekle getirip servoların beyaz aparatlarını takarak servoları sabitleyin. Servoların beyaz aparatlarını takarken servonun açılarını değiştirmemeye dikkat edin. Şekildeki konumlara ne kadar yakın montaj yaparsak robotumuz o kadar düzgün hareket edecektir. Montaj konumları şekildekilerden farklı olursa robot ya yere yakın ya da yerden çok yüksekte hareket edebilir.
Unutmayın bu sabitleme işlemini yaparken tüm robot çalışır vaziyette olmalı ve servoların beyaz aparatlarını takarken robot yukarıdaki şekilde olmalı. Servo sabitleme işlemi tamamlandığında robot ayakta durabilir vaziyette olacaktır.
4) Servo motorların sabitleme işlemi yapıldıktan sonra asıl kodumuzu yükleyebiliriz. Bu işlem için Arduino üzerine takılı olan Sensör Shield i çıkarın. Arduino'yu PC ye takarak ister otonom ister bluetooth kontrollü kodunuzu robota yükleyin. Yükleme tamamlandıktan sonra PC bağlantısını kesin ve sensör shield i tekrar Arduino Uno üzerine takın. Pili sensör shield üzerine taktığınızda robotumuz çalışmaya hazır olacaktır.
Bluetooth Modülü İle Çalıştırmak
Örümcek robotu bluetooth modülü ile çalıştırmak için servo ayar kodunu yükleyip servoları sabitledikten sonra bluetooth kodunu Arduino'ya yükleyin. Bluetooth modülünü sensör shield üzerinde bulunan TX RX - + headerına takabiliriz.
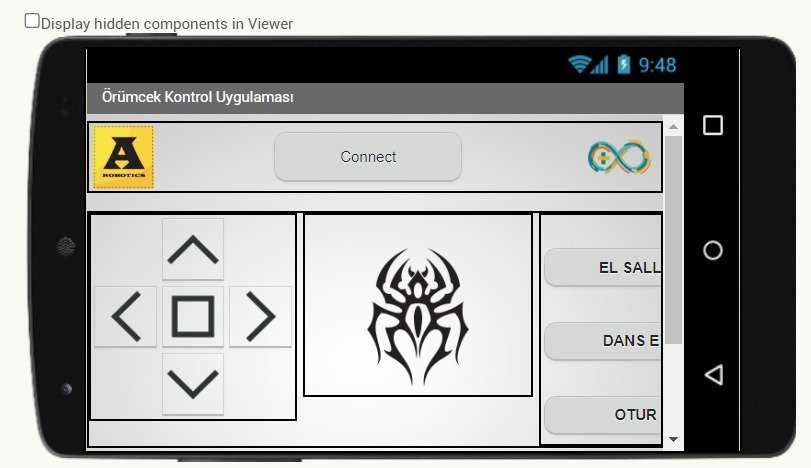
Eğer bluetooth modülümüz ile daha önceden eşleşmediysek öncelikle telefonumuz ile bluetooth modülümüzü eşleştirmemiz gerekiyor. Robot çalışıyorken telefonun bluetooth ayarlarına girin. Etraftaki bluetooth cihazlar kısmında bir süre sonra HC05 görünür olacaktır. Üzerine tıkladığınızda parola isteyecektir ve parola genelde 1234 veya 0000 olur yazacaktır. Eşleşmemizi yaptıktan sonra android uygulamamızı (kaynak dosya içerisinde bulunan .apk uzantılı dosyayı telefonumuza atıp yüklediğimizde açılan uygulama) açıyoruz. Connect butonu ile az önce eşleştiğimiz HC05 cihazını listeden bulup seçiyoruz ve robotumuzu uzaktan hareket ettiriyoruz :)
 Önemli Notlar
Önemli Notlar
Robotu çalıştırmak için 3.7v lipo pil veya 18650 Li-Ion pil kullanın.
Arduino kodu yüklenirken hata alırsanız eğer muhtemelen bilgisayarınızda FlexiTimer2 kütüphanesi bulunmuyordur. Buradan kütüphaneyi indirin ve Arduinonun kurulu olduğu klasörde Libraries klasörüne koyarak kodu yüklemeyi tekrar deneyin.
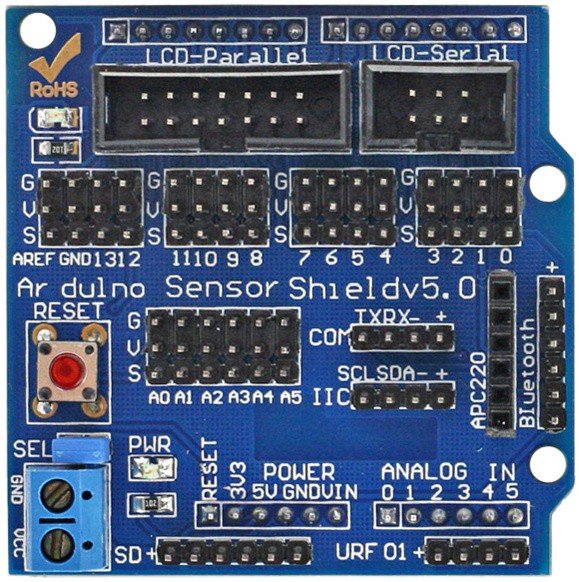
Bluetooth modülü ile kullanmak isterseniz sensör shield üzerinde aşağıda işaretli header pinlerini kullanabilirsiniz. Eğer bluetooth ile bağlantı kurulduğu halde robotunuz çalışmaz ise RX ve TX pinlerinin yerlerini değiştirmeyi deneyin.
Bluetooth modülü ile kontrol isterseniz bluetooth modülü takılı iken Arduino'ya kod yükleyemezseniz. Takılı olmamasına dikkat edin.
Robotun düzgün ve sağlam çalışması için SG90 servo motorların beyaz aparatlarını yapıştırıcı dökerek veya sıcak silikon ile sabitleyebilirsiniz.