| Data Çıkışı | Dijital |
| Çalışma Voltajı | 5V DC |
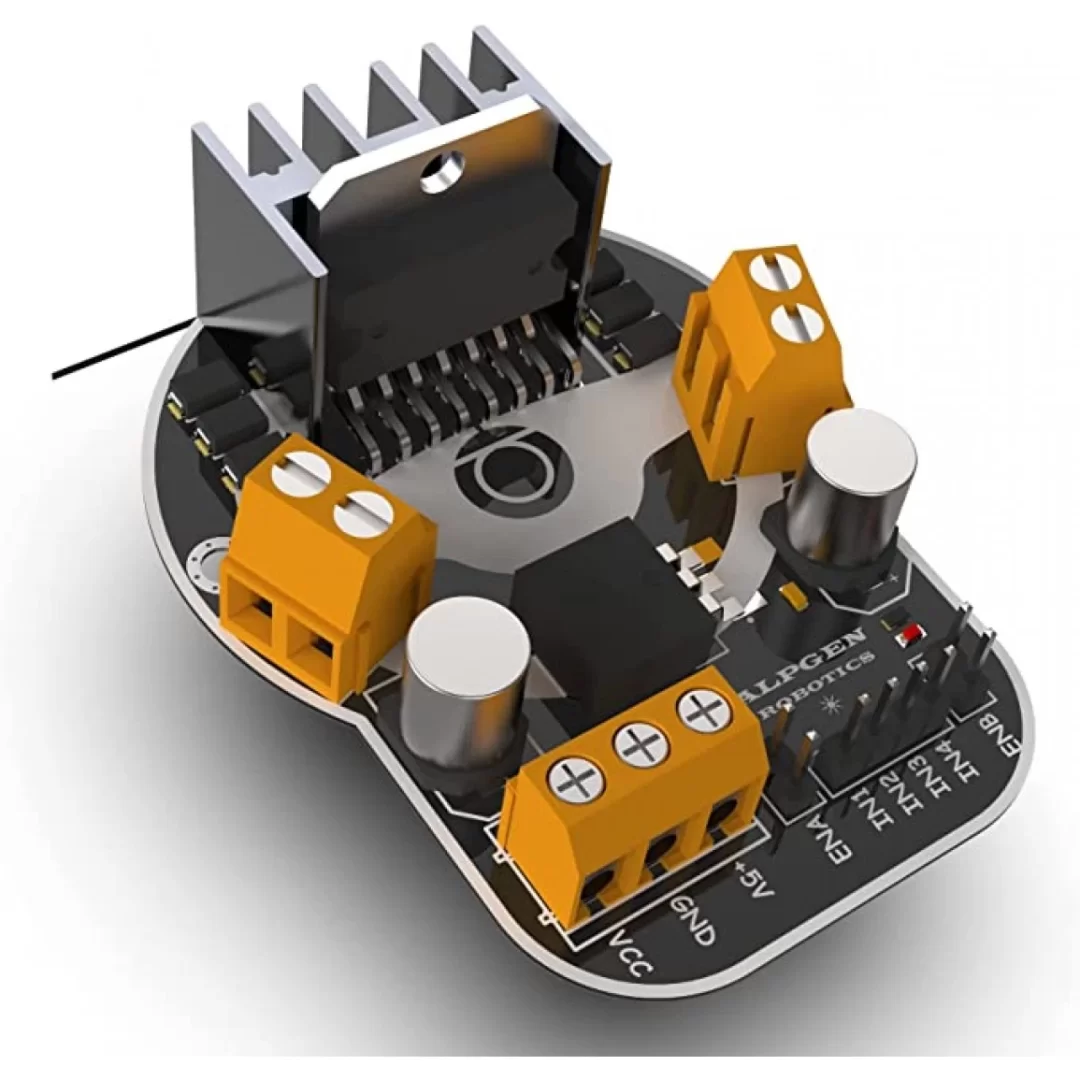
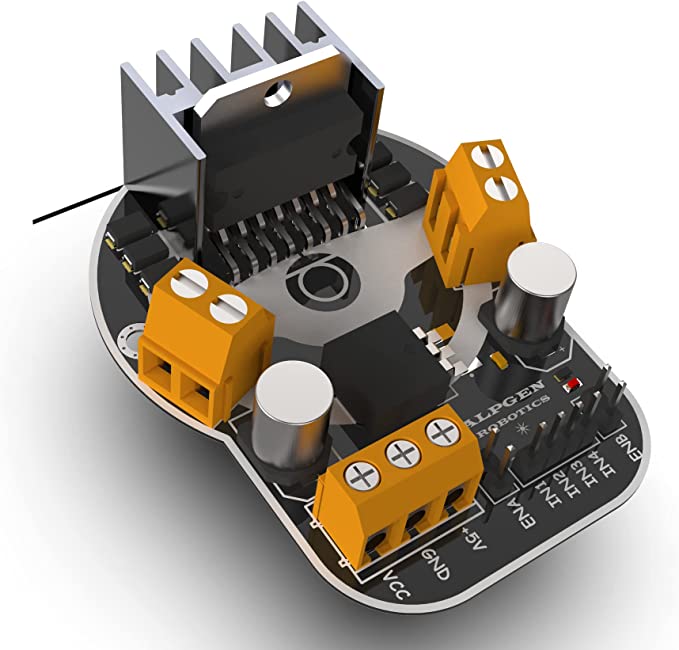
| En | 52.05mm |
| Boy | 69.37mm |
| Vida Delik Çapı | 3.2mm |
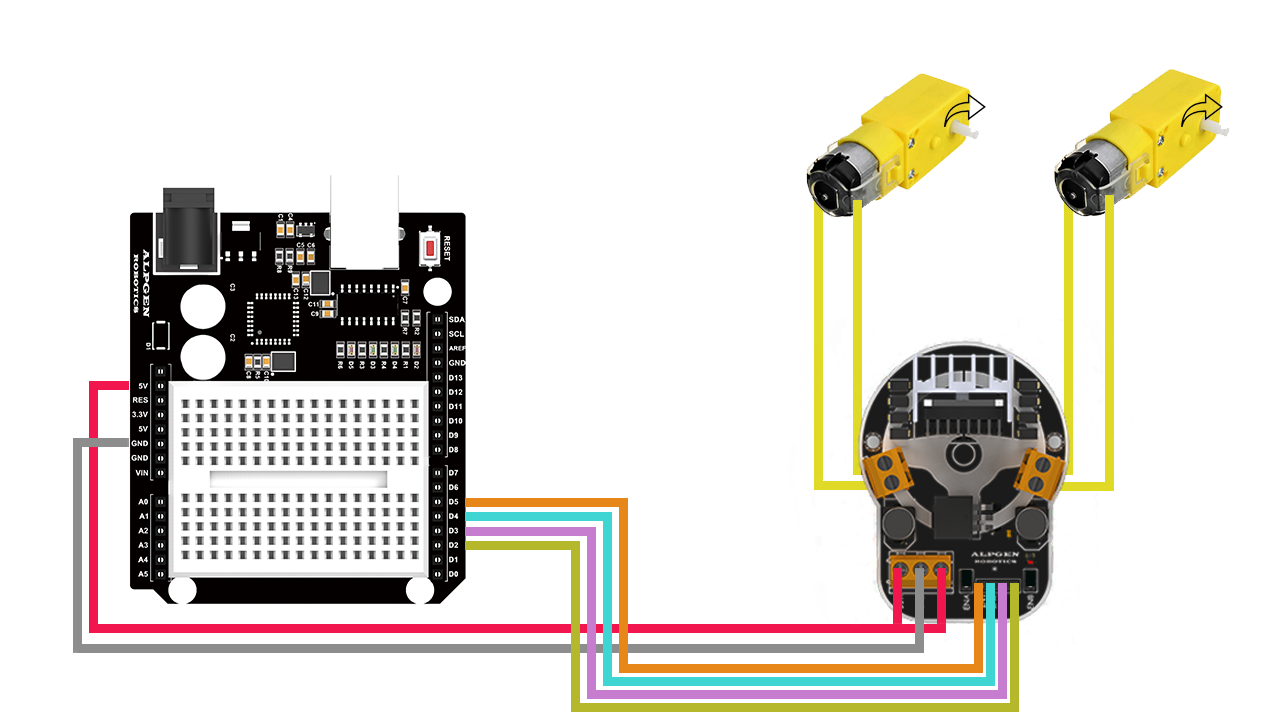
| L298N DC Motor Sürücü Modülü | Arduino Uno Breadboard |
| IN1 | 5 |
| IN2 | 4 |
| IN3 | 3 |
| NI4 | 2 |
Örnek Proje Arduino Kodu
/* ALPGEN Robotics */// L298N Motor Sürücü Modülü Kullanımı// 05.08.2021// Soru ve Yardım İçin: proje@alpgenrobotics.com// www.alpgenrobotics.com //// 1. Motor için pinlerin tanımlanmasıintmotor1pin1=2;intmotor1pin2=3;// 2. Motor için pinlerin tanımlanmasıintmotor2pin1=4;intmotor2pin2=5;voidsetup(){ // Tanımlanan pinlerin çıkış olarak ayarlanması pinMode(motor1pin1,OUTPUT); pinMode(motor1pin2,OUTPUT); pinMode(motor2pin1,OUTPUT); pinMode(motor2pin2,OUTPUT);}voidloop(){ // 1. ve 2. Motorların 1. pinlerine güç verilmesi digitalWrite(motor1pin1,HIGH); digitalWrite(motor1pin2,LOW); digitalWrite(motor2pin1,HIGH); digitalWrite(motor2pin2,LOW); //1000mslik bekleme yapılması delay(1000); // 1. ve 2. Motorların 2. pinlerine güç verilmesi digitalWrite(motor1pin1,LOW); digitalWrite(motor1pin2,HIGH); digitalWrite(motor2pin1,LOW); digitalWrite(motor2pin2,HIGH); //1000mslik bekleme yapılması delay(1000);}

| Taksit | Taksit Tutarı | Toplam Tutar |
|---|---|---|
| 1 | 495,00 TL | 495,00 TL |
| 2 | 247,50 TL | 495,00 TL |
| 3 | 165,00 TL | 495,00 TL |
| 4 | 136,13 TL | 544,50 TL |
| 5 | 110,88 TL | 554,40 TL |
| 6 | 94,05 TL | 564,30 TL |

| Taksit | Taksit Tutarı | Toplam Tutar |
|---|---|---|
| 1 | 495,00 TL | 495,00 TL |
| 2 | 247,50 TL | 495,00 TL |
| 3 | 165,00 TL | 495,00 TL |
| 4 | 136,13 TL | 544,50 TL |
| 5 | 110,88 TL | 554,40 TL |
| 6 | 94,05 TL | 564,30 TL |

| Taksit | Taksit Tutarı | Toplam Tutar |
|---|---|---|
| 1 | 495,00 TL | 495,00 TL |
| 2 | 247,50 TL | 495,00 TL |
| 3 | 165,00 TL | 495,00 TL |
| 4 | 136,13 TL | 544,50 TL |
| 5 | 110,88 TL | 554,40 TL |
| 6 | 94,05 TL | 564,30 TL |

| Taksit | Taksit Tutarı | Toplam Tutar |
|---|---|---|
| 1 | 495,00 TL | 495,00 TL |
| 2 | 247,50 TL | 495,00 TL |
| 3 | 165,00 TL | 495,00 TL |
| 4 | 136,13 TL | 544,50 TL |
| 5 | 110,88 TL | 554,40 TL |
| 6 | 94,05 TL | 564,30 TL |

| Taksit | Taksit Tutarı | Toplam Tutar |
|---|---|---|
| 1 | 495,00 TL | 495,00 TL |
| 2 | 247,50 TL | 495,00 TL |
| 3 | 165,00 TL | 495,00 TL |
| 4 | 136,13 TL | 544,50 TL |
| 5 | 110,88 TL | 554,40 TL |
| 6 | 94,05 TL | 564,30 TL |

| Taksit | Taksit Tutarı | Toplam Tutar |
|---|---|---|
| 1 | 495,00 TL | 495,00 TL |
| 2 | 247,50 TL | 495,00 TL |
| 3 | 165,00 TL | 495,00 TL |
| 4 | 136,13 TL | 544,50 TL |
| 5 | 110,88 TL | 554,40 TL |
| 6 | 94,05 TL | 564,30 TL |

| Taksit | Taksit Tutarı | Toplam Tutar |
|---|---|---|
| 1 | 495,00 TL | 495,00 TL |
| 2 | 247,50 TL | 495,00 TL |
| 3 | 165,00 TL | 495,00 TL |
| 4 | 136,13 TL | 544,50 TL |
| 5 | 110,88 TL | 554,40 TL |
| 6 | 94,05 TL | 564,30 TL |

| Taksit | Taksit Tutarı | Toplam Tutar |
|---|---|---|
| 1 | 495,00 TL | 495,00 TL |
| 2 | 247,50 TL | 495,00 TL |
| 3 | 165,00 TL | 495,00 TL |
| 4 | 136,13 TL | 544,50 TL |
| 5 | 110,88 TL | 554,40 TL |
| 6 | 94,05 TL | 564,30 TL |

| Taksit | Taksit Tutarı | Toplam Tutar |
|---|---|---|
| 1 | 495,00 TL | 495,00 TL |
| 2 | 247,50 TL | 495,00 TL |
| 3 | 165,00 TL | 495,00 TL |
| 4 | 136,13 TL | 544,50 TL |
| 5 | 110,88 TL | 554,40 TL |
| 6 | 94,05 TL | 564,30 TL |