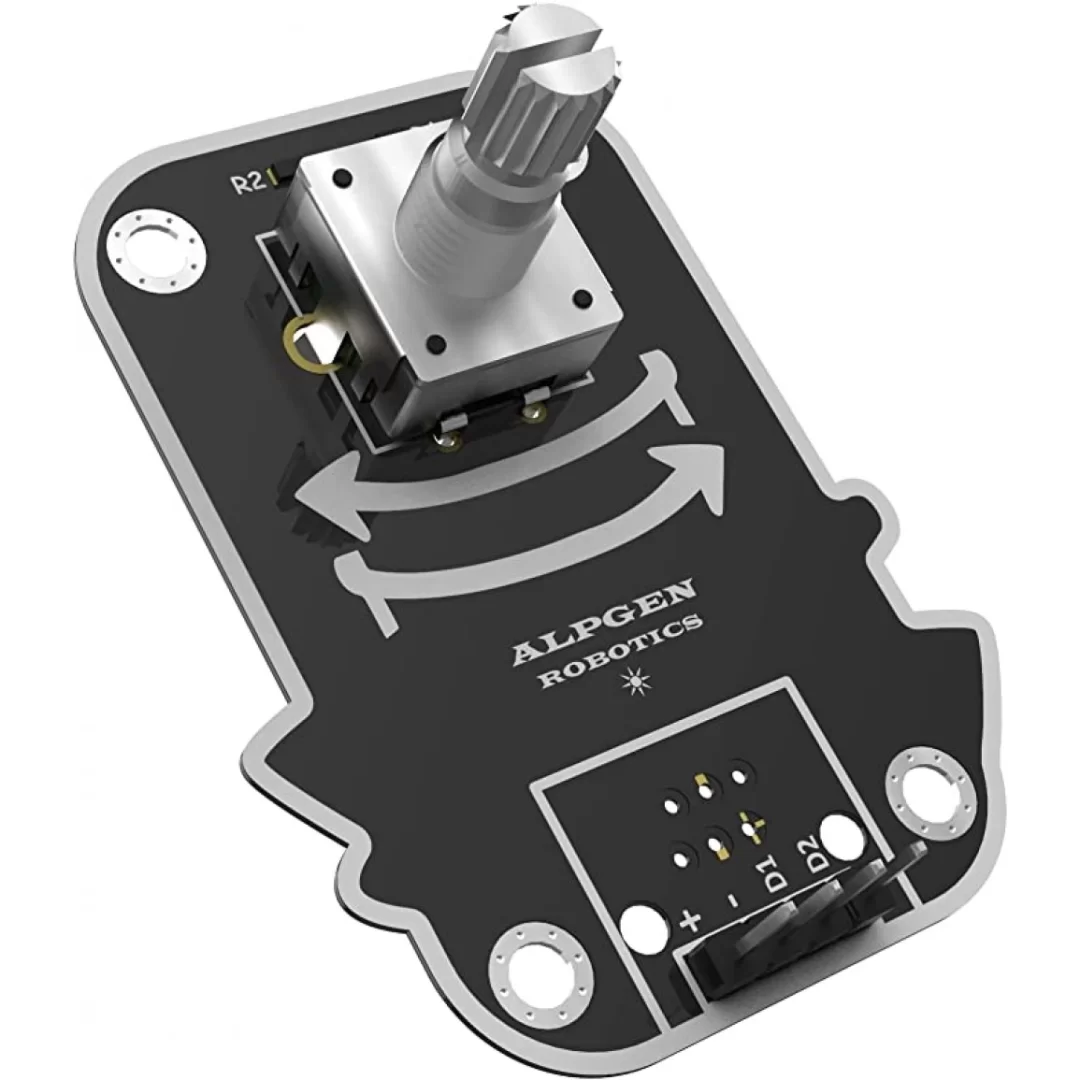
Arduino Uyumlu Rotary Enkoder Modülü – Döner Hareketleri Hassasiyetle Ölçün
Arduino uyumlu Rotary Enkoder Modülü, döner hareketlerinizi hassas bir şekilde ölçmek için mükemmel bir çözümdür. Bu modül, dönüş açısını ve yönünü tespit ederek, Arduino projelerinde motor kontrolü, robotik sistemler ve diğer hareket izleme uygulamaları için kullanılır. Enkoder, dönen bir şaft üzerindeki hareketi sayısal verilere dönüştürür ve bu veriler Arduino’ya gönderilerek işlem yapılmasını sağlar. Modül, yüksek hassasiyetli veri sağlamak amacıyla optik algılama yöntemi kullanır ve döner hareketlerin doğru bir şekilde ölçülmesini sağlar.
Çalışma Prensibi: Rotary enkoder, bir dizi optik sensör ve bir dönen diske sahiptir. Disk üzerindeki işaretler, optik sensörler tarafından algılanır ve bu işaretlerin her biri bir sayısal veriyle ilişkilendirilir. Enkoder, dönen diskin her bir hareketini sayarak açı ve yön bilgilerini sağlar. Bu veriler Arduino’ya dijital sinyal olarak iletilir, böylece motor hızı, dönüş yönü ve pozisyonu doğru bir şekilde ölçülür ve kontrol edilir. Bu sistem, geri bildirimli motor kontrolü, robotik hareket ve birçok otomasyon projesi için kullanışlıdır.
Öne Çıkan Özellikler:
Arduino projelerinizde döner hareketleri ölçmek ve kontrol etmek için Rotary Enkoder Modülü, hassasiyet ve güvenilirlik sunar. Bu modül, motor hızını ve yönünü doğru bir şekilde ölçmek için ideal bir bileşendir.
Aşağıda, Arduino Rotary Enkoder Modülü için örnek bir kod bulunmaktadır. Bu kod, enkoderin döner hareketini algılar ve her bir adımda bir sayıyı arttırarak, döndürme yönünü belirler.
// Rotary enkoder pinlericonstintclkPin=2; // Clock pin (D2)constintdtPin=3; // Data pin (D3)intclkState; // Clock pin durumuintdtState; // Data pin durumuintlastClkState=LOW; // Önceki Clock pin durumuintencoderPos=0; // Enkoder pozisyonuvoidsetup(){
// Seri iletişimi başlat
Serial.begin(9600);
// Pinleri giriş olarak ayarla
pinMode(clkPin,INPUT);
pinMode(dtPin,INPUT);
// İlk durumu oku
clkState=digitalRead(clkPin);
dtState=digitalRead(dtPin);}voidloop(){
// Clock pin durumunu oku
clkState=digitalRead(clkPin);
// Eğer Clock pin durumu değişmişse
if(clkState!=lastClkState){
// Eğer Data pin'i Clock pin'inden önce HIGH ise, saat yönünde dönüyor
if(digitalRead(dtPin)!=clkState){
encoderPos++;
}else{
// Eğer Data pin'i Clock pin'inden önce LOW ise, karşı yönlü dönüyor
encoderPos--;
}
// Enkoder pozisyonunu yazdır
Serial.print("Encoder Position: ");
Serial.println(encoderPos);
}
// Önceki Clock pin durumunu güncelle
lastClkState=clkState;}
| Taksit | Taksit Tutarı | Toplam Tutar |
|---|---|---|
| 1 | 455,00 TL | 455,00 TL |
| 2 | 227,50 TL | 455,00 TL |
| 3 | 151,67 TL | 455,00 TL |
| 4 | 125,13 TL | 500,50 TL |
| 5 | 101,92 TL | 509,60 TL |
| 6 | 86,45 TL | 518,70 TL |

| Taksit | Taksit Tutarı | Toplam Tutar |
|---|---|---|
| 1 | 455,00 TL | 455,00 TL |
| 2 | 227,50 TL | 455,00 TL |
| 3 | 151,67 TL | 455,00 TL |
| 4 | 125,13 TL | 500,50 TL |
| 5 | 101,92 TL | 509,60 TL |
| 6 | 86,45 TL | 518,70 TL |

| Taksit | Taksit Tutarı | Toplam Tutar |
|---|---|---|
| 1 | 455,00 TL | 455,00 TL |
| 2 | 227,50 TL | 455,00 TL |
| 3 | 151,67 TL | 455,00 TL |
| 4 | 125,13 TL | 500,50 TL |
| 5 | 101,92 TL | 509,60 TL |
| 6 | 86,45 TL | 518,70 TL |

| Taksit | Taksit Tutarı | Toplam Tutar |
|---|---|---|
| 1 | 455,00 TL | 455,00 TL |
| 2 | 227,50 TL | 455,00 TL |
| 3 | 151,67 TL | 455,00 TL |
| 4 | 125,13 TL | 500,50 TL |
| 5 | 101,92 TL | 509,60 TL |
| 6 | 86,45 TL | 518,70 TL |

| Taksit | Taksit Tutarı | Toplam Tutar |
|---|---|---|
| 1 | 455,00 TL | 455,00 TL |
| 2 | 227,50 TL | 455,00 TL |
| 3 | 151,67 TL | 455,00 TL |
| 4 | 125,13 TL | 500,50 TL |
| 5 | 101,92 TL | 509,60 TL |
| 6 | 86,45 TL | 518,70 TL |

| Taksit | Taksit Tutarı | Toplam Tutar |
|---|---|---|
| 1 | 455,00 TL | 455,00 TL |
| 2 | 227,50 TL | 455,00 TL |
| 3 | 151,67 TL | 455,00 TL |
| 4 | 125,13 TL | 500,50 TL |
| 5 | 101,92 TL | 509,60 TL |
| 6 | 86,45 TL | 518,70 TL |

| Taksit | Taksit Tutarı | Toplam Tutar |
|---|---|---|
| 1 | 455,00 TL | 455,00 TL |
| 2 | 227,50 TL | 455,00 TL |
| 3 | 151,67 TL | 455,00 TL |
| 4 | 125,13 TL | 500,50 TL |
| 5 | 101,92 TL | 509,60 TL |
| 6 | 86,45 TL | 518,70 TL |

| Taksit | Taksit Tutarı | Toplam Tutar |
|---|---|---|
| 1 | 455,00 TL | 455,00 TL |
| 2 | 227,50 TL | 455,00 TL |
| 3 | 151,67 TL | 455,00 TL |
| 4 | 125,13 TL | 500,50 TL |
| 5 | 101,92 TL | 509,60 TL |
| 6 | 86,45 TL | 518,70 TL |

| Taksit | Taksit Tutarı | Toplam Tutar |
|---|---|---|
| 1 | 455,00 TL | 455,00 TL |
| 2 | 227,50 TL | 455,00 TL |
| 3 | 151,67 TL | 455,00 TL |
| 4 | 125,13 TL | 500,50 TL |
| 5 | 101,92 TL | 509,60 TL |
| 6 | 86,45 TL | 518,70 TL |